




















¿En qué fallan los controles de crucero adaptativos? Los controles de crucero adaptativos mantienen una distancia de seguridad con el coche que nos precede, pero su uso no es siempre ideal. Aquí tienes los principales inconvenientes de estos sistemas.
Poco a poco se va popularizando este tipo de dispositivos que se engloban dentro de los denominados «sistemas de asistencia a la conducción«, junto con elementos como la alerta de pérdida de carril, los sensores de ángulo muerto, etc. Su uso debe entenderse como una ayuda ante distracciones del conductor, pero no siempre su funcionamiento es correcto. Veamos en qué fallan los controles de crucero adaptativos.
Cada fabricante lo denomina de una manera diferente, Active Cruise Control, Adaptative Cruise Control… pero en base todos hacen lo mismo: mantienen una velocidad constante elegida por el conductor pero la adaptan, si es necesario, para mantener una distancia de seguridad con el vehículo que nos precede.
Para que se entienda más fácilmente, lo explicaré con un ejemplo práctico:
Circulamos por una autopista y seleccionamos una velocidad de 120 km/h en el dispositivo. El coche mantiene de forma constante esa velocidad sin que el conductor tenga que pisar el acelerador. Ahora bien, si nos acercamos a un vehículo que circula a una velocidad inferior- por ejemplo un camión a 90 km/h– el coche reducirá la velocidad lo suficiente como para mantener una distancia de seguridad con dicho vehículo y no la modificará hasta que él o nosotros cambiemos de carril.
La idea es buena y suele funcionar bien, pero tiene algunos puntos débiles que conviene tener en cuenta a la hora de utilizarlos. Eso sí, antes de nada, conviene saber cómo funcionan para comprender por qué fallan en determinadas situaciones.
Cómo funcionan los controles de crucero adaptativos
Todos estos sistemas añaden al control de crucero convencional un dispositivo que calcula la distancia y la velocidad del vehículo que va delante de nosotros y trabaja en comunicación con la unidad de mando motor y con la de los frenos, para poder regular la velocidad e incluso detener el vehículo. Las diferencias están en cómo miden esa distancia y velocidad relativa.
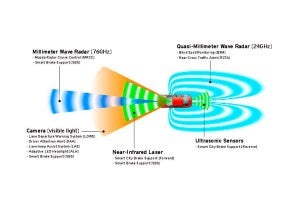
- Mediante cámaras de visión 3D: es el sistema que más emplean fabricantes como Mini o BMW. En ellos, una cámara de visión estereoscópica va instalada en la parte superior del parabrisas (tras el retrovisor interior) y ésta informa a la unidad de mando del obstáculo que hay delante. Su ventaja es que su mantenimiento es más barato y no son tan sensibles a los golpes de aparcamiento, etc. Su inconveniente es que se deslumbran fácilmente cuando el sol va bajo y dejan de funcionar si llevamos el sol de cara antes de anochecer o tras el amanecer.
- Mediante láser: un emisor láser ubicado en el mismo lugar que las cámaras anteriores mide la distancia con el vehículo precedente.
- Mediante radar: un radar es el encargado de calcular las velocidades relativas y detectar los obstáculos. Aquí hay dos tipos de ubicaciones: los que montan el radar en el faldón delantero y los que lo llevan más alto, normalmente en el centro de la parrilla, tras el logotipo de la marca. Son mucho más precisos que los de las cámaras, pero son más sensibles y requieren recalibraciones en caso de recibir golpes de aparcamiento, si hay un exceso de suciedad en ellos (mosquitos, barro, nieve…), etc.
- Mixtos: los más complejos y de funcionamiento más seguro. Emplean el radar o la cámara en combinación con el láser. Son los que mejor funcionan, pero son más caros y también los más delicados en caso de avería.
Cuáles son los puntos débiles de los controles de crucero adaptativos
Lo primero que debemos saber es que este tipo de sistemas sólo actúan cuando detectan objetos que están en movimiento. Si en el ejemplo anterior del camión que circula a 90 km/h cuando nos acercamos a 120 km/h tras él, en lugar de un camión circulando, tenemos un coche accidentado bloqueando nuestro carril, o la cola de un peaje, el sistema lo obviará, no frenará. No es que los sensores no lo detecten, es que están programados así para evitar sustos y falsas alarmas provocadas, por ejemplo, por un poste de luz o una señal de tráfico colocada cerca del arcén.
Si, por el contrario, nos acercamos a un vehículo que va reduciendo su velocidad hasta detenerse, el sistema sí nos mantendrá a una distancia de seguridad prefijada y también reducirá nuestra velocidad, incluso llegando a parar por completo el vehículo si el que nos precede se detiene.
Otra limitación es que no detectan a peatones ni ciclistas en la mayoría de los casos.
Tras haber probado numerosos modelos equipados con este sistema, me he dado cuenta de que su funcionamiento es claramente mejorable en la mayoría de ellos y hay dos situaciones en las que pueden provocar una situación de riesgo en lugar de evitarla:
- A veces dan frenazos de improviso: esta situación es especialmente frecuente en los modelos que emplean un radar montado en la parrilla, bastante alto respecto al suelo. La situación de riesgo se produce cuando estamos circulando por el carril izquierdo en una curva a izquierdas mientras que por el carril derecho circula un camión trazando la curva a menos velocidad. El láser detecta el camión circulando mucho más despacio que nosotros (no está en línea, sino en una trayectoria paralela y calcula mal las velocidades relativas, aunque el camión vaya a 80 km/h puede llegar a interpretar que circula a 60 km/h) y «cree» que está en nuestro carril.
- Para evitar el impacto, actúa bruscamente sobre los frenos y nos hará reducir la velocidad súbitamente, lo que resulta muy incómodo y a veces asusta a los pasajeros. Bastará con que pisemos el acelerador y seguiremos el adelantamiento. El mayor peligro es si detrás de nosotros circula otro coche que no respeta la distancia de seguridad y lo que menos se espera es que de repente demos un zapatazo al freno, lo que puede provocarnos un golpe por alcance bastante grave.
- Mi consejo para evitar esta situación es que, siempre que estés rebasando a otro vehículo, lleves el pie en el pedal del acelerador anulando el control de crucero durante ese intervalo de tiempo.
- No detectan cargas en voladizo: el segundo riesgo me lo he encontrado en los coches que montan el radar en la parte baja del faldón. En general funcionan muy bien y no provocan los sustos descritos anteriormente, ya que no provocan tantas falsas alarmas al adelantar a un camión en una curva, pero tienen una limitación técnica.
- Al ir tan cerca del asfalto, no detectan las cargas que lleven en voladizo los vehículos que circulen delante. Detectarán el último eje del remolque, que puede estar varios metros más allá de la viga, la pala del aerogenerador o la carga que lleve en voladizo. Esto hace que calcule la distancia respecto al eje y provoca que la punta de la pala del aerogenerador quede muy cerca de nuestro parabrisas… o, peor aún, que lo golpeemos.
- Igual que antes, te recomiendo que en estas situaciones seas tú quien asuma el control del coche y no el dispositivo.
En todo momento debemos ser conscientes de que este tipo de sistemas se han creado para mitigar y reducir el riesgo en caso de despiste del conductor, pero no son infalibles, ni mucho menos, por lo que siempre deberemos permanecer atentos a la carretera y evitar llegar a tener los problemas descritos.
Comentarios